Trustworthy Human-Robot Interaction Summer School
Introduction

The Trustworthy Human-Robot Interaction Summer School or THRISS welcomes participants from different backgrounds to meet for four days and deepen their knowledge in the interdisciplinary fields of Cognitive Robotics and Human-Robot Interaction. From Robotics Engineering to Computer Science, Social Psychology, Cognitive, and Neuroscience, etc., the Summer School is designed for Ph.D. and experienced master’s students willing to meet, discover, and learn about robotic cognitive models to promote trustworthy social interactions with humans. The event is organized under the TERAIS project within the international collaboration among the Comenius University of Bratislava (SK), the University of Hamburg (DE), and the Italian Institute of Technology (IT). Participants will have the chance to join presentations andL meetings with Keynote Speakers, practice with Workshops on Human-Robot Interaction, and expose their research at the MEiCogSci Student Conference, connected with the Summer School. THRISS is supported by the Slovak Society for Cognitive Science.
Timetable
| Monday | Tuesday | Wednesday | Thursday | |
|---|---|---|---|---|
| 8:00 - 8:30 | registration | |||
| 8:30 - 9:00 | Introduction C | |||
| 9:00 - 10:30 | Pablo Barros C | Matthias Kerzel C | Martin Takac WS 4 C | Student Projects Finale I-9 open for MEiCogSci |
| 10:30 - 11:00 | coffee break | coffee break | ||
| 11:00 - 11:30 | Shelly Levy Tzedek C | WS 2 Bipin Indurkhya H6 | coffee break | |
| 11:30 - 12:30 | Student Projects I-9 | final lunch - "party" I-9 | ||
| 12:30 - 13:30 | lunch | |||
| 13:30 - 14:00 | lunch | lunch | ||
| 14:00 - 14:30 | Student Projects I-9 | |||
| 14:30 - 15:00 | Alessandra Sciutti B | |||
| 15:00 - 16:00 | WS 1 Andrej Lúčny H6 | WS 3 Viktor Kocur H6 | WS 5 Carlo Mazzola & Luca Garello H6 | |
| 16:00 - 16:15 | short break | |||
| 16:15 - 17:30 | MEi:CogSci MS Student Presentations | |||
| 17:30 - 18:30 | Student Projects I-9 | Student Projects I-9 | MEi:CogSci POSTER Session | |
| 18:30 - 19:00 | Social Dinner |
THRISS Venue
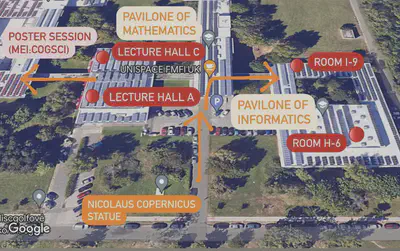
The summer school takes place at the Faculty of Mathematics, Physics and Informatics, Comenius University, in Mlynská dolina, Bratislava. Enter from the eastern side (close to the statue of Nicolas Copernicus), then follow the signs for the THRISS summer school. Click on the map of lecture halls on the right side below to see the building outline and navigate to the places where lectures and workshops will be held.
Entrances to the Faculty
The buliding has two entrances: from the South (Physics building) and from the East (Mathematics building). Most of the summer school will take place in the building of Informatics and in main lecture halls, so you will want to use the East entrance. The East entrance is open on working days bw 6:00-20:15. After these hours use the Physics entrance (both buildings are connected).
Where to eat
The Faculty has a canteen (FAYNFOOD) in the Physics building close to the South entrance and a cafeteria (FREEFOOD) in the Mathematics wing, at the end of the long corridor straight opposite to the East entrance. The full price for a lunch is approx. 6 Eur. The current menu, as well as other dining options, can be found here.
There are several buffees, a cafeteria and a pizzeria in the nearby Faculty of natural sciences and Faculty of information technologies, and plenty others are in the student’s dormitory area in Slávičie údolie.
Internet
Eduroam Wifi is available in the Faculty buildings - you should be able to log in with your home university Eduroam credentials.
How to get there
From the Central railway station (Hlavná stanica): take the bus no. 32, get off at the bus stop Botanická záhrada ( approx. 13 min).
From the railway station Petržalka: take the bus no. 91 or 191 to Nový most (approx. 4 min), then change for the tram no. 4 or 9 to Botanická záhrada (approx. 6 min).
From the airport: take the bus no. 61 to the Central railway station (Hlavná stanica, approx. 25 min), then change for the bus no. 32, get off at the bus stop Botanická záhrada (approx. 13 min).
From the bus station Mlynské nivy: take the bus no. 70 to Nový most (approx. 5 min), then change for the tram no. 4 or 9 to Botanická záhrada (approx. 6 min).
On foot from Botanická záhrada: from tram/bus station Botanical garden (Botanická záhrada) or from hotel Družba cross the big street via the overbridge and continue straight on. Pass the Faculty of Natural Sciences (Prírodovedecká fakulta) on the left and the next building on your left is the Faculty of Mathematics, Physics and Informatics. Enter from the eastern side (close to the statue of Nicolas Copernicus), then follow the signs for the THRISS summer school (see the map).
{kind=link}
By car: If coming from Austria or Hungary, follow the motorway D2 (E65), and right after crossing the Danube take exit 62 (Mlynská dolina, Devín). If coming from Czech Republic, follow the motorway D2 (E65), right after coming through the tunnel Sitina, take exit towards Devín, Karlova ves, Centrum. Here is the location of FMPH UK on Google maps.
Accommodation
Couple of our tips for price-reasonable accomodation. Unfortunately the nearby dormitories are not available at the time of the summer school.
Apart-Hostel Zero
There are multiple options for accommodation in Bratislava. We cordially recommend Zero Hostel in the excellent location of Staré Mesto. Hostel is also within walking distance from the tram stop Kapucínska, where you can take number 9 heading directly to Botanická záhrada.
Hostel Bratislava
We also recommend both available and culturally enriching Hostel Bratislava, which is located in town section Ružinov near the city center. Tram stop Chlumeckého is also 2 minutes walking distance from the hostel, where you can take tram number 9 heading to Botanická záhrada.
About THRISS
Social interaction is not always an easy task. Others’ behavior might be ambiguous and hard to grasp. As a result, sometimes it is difficult to establish a common ground, the minimum grade of reciprocal understanding required for interactions to be meaningful, and this is particularly true for social interactions between humans and robots, the study of which is generally termed the Human-Robot Interaction or HRI. While humans develop their socio-cognitive abilities for improving mutual understanding quite early in their lives, robots lack such skills. Utilizing cognitive modeling within cognitive robotics is a way to make robots more considerate and aware of people as well as make their behavior more legible and explainable and make robots more socially appealing and available. Not just the appearance, but behavior and interaction of robots with humans should lead people to trust them, rendering this trust as justified. At the intersection of Social Robotics, Human-Robot Interaction, and Cognitive Robotics, research calls for a multidisciplinary effort. The Summer School on Cognitive Robotics for Social Interaction promotes this multifaceted approach.
Invited Speakers and Lecturers
- Bio: Pablo Barros is currently a senior research Scientist at Sony Europe, in Belgium. Since he concluded his PhD at the University of Hamburg, He has worked on affective computing and social robotics over the past years, in particular on the modeling of intrinsic affect on dynamic and contextually rich interactions. His current research interests include the modeling of competitive and cooperative behavior in human dynamics, the exploration of explainable AI for affective perception, and the continual adaptation of social agents towards multiple persons.
- Title: Towards Modeling Social Components of Trust in Competitive and Cooperative Game-Based Interactions
- Abstract: Contextual games like complex card games and role-playing games (RPGs) offer rich, narrative-driven environments that are ideal for studying and modeling social constructs such as empathy, rivalry, trust, engagement, and competitiveness. These games require players to navigate complex emotional landscapes, make strategic decisions based on social cues, and engage in deep narrative experiences, all within a structured but highly flexible environment. By adding intelligent agents and robots into these scenarios, researchers can investigate how these systems can understand and replicate human social behaviors, adapt to emotional contexts, and contribute to shared experiences in meaningful ways. In this talk, I will present some of the research I have been doing in this area, in particular on the modeling of such social cues, and their implication on the development of high-level social constructs, such as trust.
- Bio: Shelly Levy-Tzedek is an associate professor and heads the Cognition, Aging and Rehabilitation laboratory at Ben-Gurion University. She obtained her B.Sc. degree summa cum laude in Bioengineering from UC Berkeley, and her M.Sc and Ph.D. degrees in Biological Engineering from the Massachusetts Institute of Technology (MIT). She has been awarded a Horizon-2020 Marie Skłodowska Curie Visiting Professorship at the Institute of Advanced Studies at the University of Freiburg in Germany, the Pedagogica award for outstanding new researchers, and the Toronto Prize for excellence in research. In 2023 she was a Scholar-in-Residence at the KTH Royal Institute of Technology in Sweden.
- Title: Trusting Social Robots in Rehabilitation: Participatory design and ethical considerations
- Abstract: I will review studies in my lab, in which we collected, as part of the design process, qualitative data from the main stakeholders - including patients, family members and clinicians. I will argue that this helps minimize errors in the design process. I will then discuss how trust in the context of rehabilitation is different from other human-robot interaction context. I will end with the 10 questions I drafted with colleagues, which each robotic development team should be asked, so we can evaluate the benefit of their contribution to society.
- Bio: Matthias Kerzel received the M.Sc. and Ph.D. degrees in computer science from the University of Hamburg, Germany. He is currently a Knowledge Technology Engineer with the Knowledge Technology Group of Prof. Stefan Wermter, University of Hamburg. He has given lectures on knowledge processing in intelligent systems, neural networks, and bio-inspired artificial intelligence. He is involved in the international SFB/TRR-169 large-scale project on crossmodal learning. His research interests include developmental neurorobotics, hybrid neurosymbolic architectures, explainable AI, and human–robot interaction. He is a board member of the European Neural Network Society (ENNS).
- Title: Developing Research Platforms for Neuro-Cognitive Robotics
- Abstract: As AI researchers, why do we spend so much effort on robotic platforms? Do we really need one more dataset? No! However, we need an artificial agent that can autonomously collect its own data, make decisions to gather information and learn through interaction with a complex physical world. We need embodied agents to study HRI and hard-to-simulate tasks like haptic perception. To this end, we developed NICO and NICOL, the Neuro-Inspired Companion and the Neuro-Inspired Collaborator. In this talk, we present selected studies, conducted on these platforms, ranging from developmental robotics to HRI and XAI.
- Bio: Alessandra Sciutti is Tenure Track Researcher, head of the CONTACT (COgNiTive Architecture for Collaborative Technologies) unit of the Italian Institute of Technology (IIT). With a background on Bioengineering, she received her Ph.D. in Humanoid Technologies from the University of Genova in 2010. After two research periods in USA and Japan, in 2018 she has been awarded the ERC Starting Grant wHiSPER (www.whisperproject.eu ), focused on the investigation of joint perception between humans and robots. She published more than 100 papers in international journals and conferences and she is currently Associate Editor for several journals on Cognitive Systems and Human-Robot Interaction. https://www.iit.it/people/alessandra-sciutti
- Title: A developmental perspective on cognitive robotics for interaction
- Abstract: This lecture will focus on cognitive robotics, discussing how to empower robots to establish more intelligent interactions with humans. The aim is to create robots that understand our needs, desires, and intentions while being transparent in their behavior. We discuss how cognitive robots can improve HRI through predictive capabilities, informed decision-making, and autonomous adaptation. Drawing inspiration from the natural progression of human cognitive skills since childhood, we propose a developmental approach for designing more human-centric machines better suited at interacting with us.
- Bio: Andrej Lúčny is a computer vision researcher at ME-Inspection SK. He received his doctorate in integrating artificial intelligence methods into real-time systems at the Department of Applied Informatics at the Faculty of Mathematics, Physics, and Informatics of Comenius University in Bratislava, where he partially works as a researcher in cognitive robotics. He co-founded the civil association Robotika.SK, which is devoted to popularizing robotics. He is a regular judge of contests in programming and robotics for young talents.
- Title: Interacting with the NICO robot: Neuro-Inspired COmpanion
- Abstract: The workshop aims to implement an exciting interaction between students and Neuro-Inspired Companion (NICO) - a humanoid robot with 22 degrees of freedom, two cameras, a speaker, and a microphone. Students start with several demos that implement individual components of the target system, including ready-made deep-learning models. Then, they design a particular interaction, compose the system that implements it, and tune the necessary parameters.
- Bio: Bipin Indurkhya is a professor of Cognitive Science and founder of the Social Robotics Lab (https://socialroboticslab.edu.pl/) at the Jagiellonian University, Krakow, Poland. His main research interests are social robotics, usability engineering, affective computing and creativity. He received his Master’s degree in Electronics Engineering from the Philips International Institute, Eindhoven (The Netherlands) in 1981, and PhD in Computer Science from University of Massachusetts at Amherst in 1985. He has taught at various universities in the US, Japan, India, Germany and Poland; and has led national and international research projects with collaborations from companies like Xerox and Samsung.
- Title: Programming for Trust: How Robot Behavior Influences Human Confidence
- Abstract: This workshop explores trust in human-robot interactions.We will start with a 20-minute theoretical overview of trust types and robot capabilities. This will be followed by a 2-hour practical session. Participants will design and test experiment scenarios to see how certain robot behaviors affect trust in robots. They’ll program these behaviors into robots using an easy coding tool integrated with ChatGPT, and then run experiments to observe the effects. The workshop concludes with a presentation of the results and participant feedback, offering both learning and hands-on experience in understanding robot trust dynamics.
- Bio: Viktor Kocur is an assistant professor at the Department of Applied Informatics, Comenius University in Bratislava. He has a master’s degree in computational physics from Czech Technical University in Prague . He finished his PhD at Comenius University with his dissertation dedicated to computer vision approaches for automated traffic surveillance. After his PhD he held a postdoc position at Brno University of Technology. His current research interests include 3D vision and deep learning.
- Title: Leveraging Binocular Vision and Deep Learning for 3D Scene Understanding with NICO
- Abstract: In this workshop we will leverage NICO's two eyes in combination with the camera geometry and deep learning to enable 3D scene understanding from the robot's perspective. We will cover the basics of monocular and stereo camera geometry and calibrate NICO's cameras using a calibration pattern. With the cameras calibrated we can measure 3D coordinates of different points seen in both images. We will use this in conjunction with deep learning methods relying on single RGB images to enable understanding of the scene.
- Bio: Martin Takac received PhD in applied informatics from Comenius University Bratislava, where he currently holds an associate professor position. He teaches cognitive science and his research interests are cognitive modeling, artificial neural networks and developmental AI. He is also interested in a wider impact of AI on society. He is a member of the Standing Committee on Ethics and Regulation of Artificial Intelligence for Slovak government, member of the scientific board of AIslovakIA - National platform for the AI development in Slovakia, member of the Cognition and Neural Computation Research Group and chair of Slovak Cognitive Science Society.
- Title: AI Ethics: challenges and use-cases
- Abstract: AI tools are increasingly being deployed in all areas of life. Due to their disruptive potential, it is very important to perceive them not just as technologies, but as techno-social systems, and consider their ethical and societal aspects. This is an inherently interdisciplinary endeavor that requires more than just technical knowledge. In this practical workshop, the participants will be given real-world use cases of the deployment of intelligent technologies that bring up ethical questions. They will team up to suggest solutions as an exercise in AI ethics-aware decision-making.
- Bio:
- Luca Garello is a post-doc at the Contact unit of the Italian Institute of Technology where he achieved his PhD title. His research is oriented towards the implementation of AI algorithms to improve human-robot interaction. Currently, his research focuses on integration of large language models (LLMs) with multimodal robotic platforms for long-term interactions.
- Carlo Mazzola is a post-doc at the Italian Institute of Technology in the CONTACT unit and research-excellence coordinator of the TERAIS project. He carries out his research in cognitive robotics and human-robot interaction with a focus on architectures for multi-party interaction, human-activity recognition, explainability and transparency in humanoid robots, user-centered interaction design, and shared perception between humans and artificial systems. He obtained his Ph.D. in Bioengineering and Robotics at the University of Genoa, coming from a previous background in Philosophy (BS and MS at the Catholic University of Milan), which he loves to leverage to explore philosophical constructs underlying technological advancements.
- Title: Sensorized devices for Human-aware human-robot Interaction
- Abstract: The development of robots’ abilities to engage in interactions with humans entails addressing a double direction: from the reception and processing of information coming from the human-populated environment to the design of robots’ behaviors to act towards it. This workshop will bring students hands-on experience on how to leverage different sensors (and hence multiple modalities) to develop skills to make robots interact with humans and the shared environment. Beyond cameras and microphones, a haptic device (the iCube) will be exploited to interact with the iCub robot simulator using the YARP middleware, Gazebo. With a modular approach, LLM-language reasoner and deep-learning computer vision and speech processing models will be complementary abilities to use and connect.
Lectures
Pablo Barros (Sony Corporation, Brussels, Belgium)

Shelly Levy Tzedek (Ben Gurion University, Beersheba, Israel)

Matthias Kerzel (University of Hamburg, Hamburg, Germany)

Alessandra Sciutti (Italian Institute of Technology, Genoa, Italy)

Workshops
Andrej Lúčny (Comenius University, Bratislava, Slovakia)

Bipin Indurkhya (Jagiellonian University, Krakow, Poland)
Viktor Kocur (Comenius University, Bratislava, Slovakia)

Martin Takáč (Comenius University, Bratislava, Slovakia)

Carlo Mazzola & Luca Garello


Organizing Committee
- General Chair:
- prof. Igor Farkaš (Comenius University, Bratislava, Slovakia)
- Organizing Chairs:
- prof. Zuzana Černeková (Comenius University, Bratislava, Slovakia)
- Dr. Kristína Malinovská (Comenius University, Bratislava, Slovakia)
- Program Chair:
- Dr. Carlo Mazzola (Italian Institute of Technology, Genoa, Italy)
- Communication Chair:
- Hassan Ali (University of Hamburg, Hamburg, Germany)
Student Enrollment
The submission is closed.
Costs
The attendance at the summer school is free of charge. We do not offer travel bursaries or accommodation, that is up to the participants to cover.
Eligibility
Both Ph.D. and experienced master’s students are invited to apply to the summer school. We will consider applications from various research backgrounds, such as: Computer Science, Robotics, Cognitive Science, and Psychology, etc.
As the summer school is held in English, good command of the English language is required. We also require basics of programming in Python and some level of previous knowledge and experience in robotics, computational modeling, human-robot interaction or empirical research using experimental design.
Application Requirements
- Curriculum Vitae (CV): 2–3 pages, including educational and academic background, relevant internships and/or work experiences, list of publications (if available), and a list of professional references.
- Motivation Letter: expressing clearly your interests in the summer school, and outlining prospects for potential future research.
- Short Motivation Video (max. 3 minutes, optional): applicants are also invited to submit an optional motivation video, conveying additional insights into their qualifications and motivation.
- A Letter of Recommendation (optional).
Submission Guidelines
- All documents must be written in English and submitted electronically in PDF format.
- Please send your application to thriss2024(AT)terais.eu. Include the THRISS Summer School 2024 and applicant names in the title.
- Submission Deadline:
31.03.202412.04.2024 - All complete applications will undergo a thorough selection process. Upon acceptance, you will receive an official acceptance letter via email with the offer to join the THRISS summer school.
- Notifications of acceptance will be sent out during the course of April, the latest by 30.04.2024.